
 产品:80
产品:80
 联系我们
联系我们

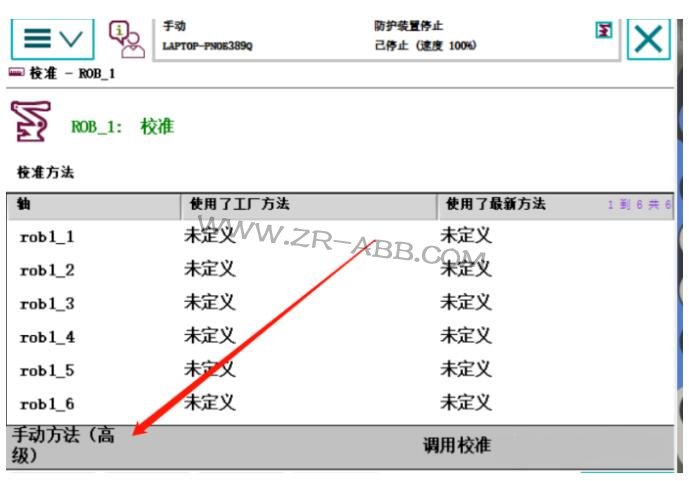
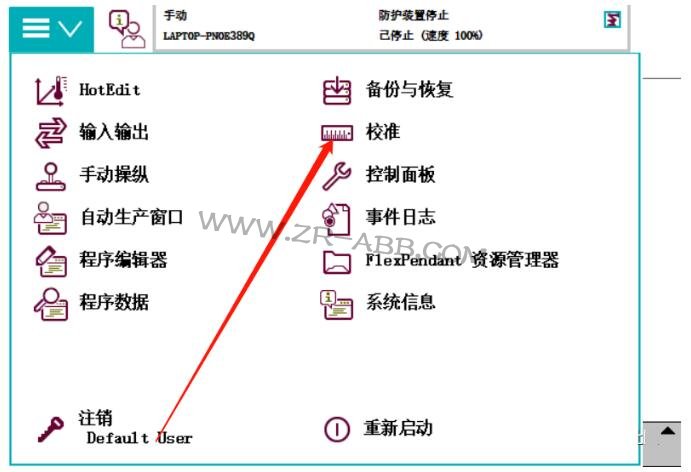
1.ABB主菜单中选择校准。
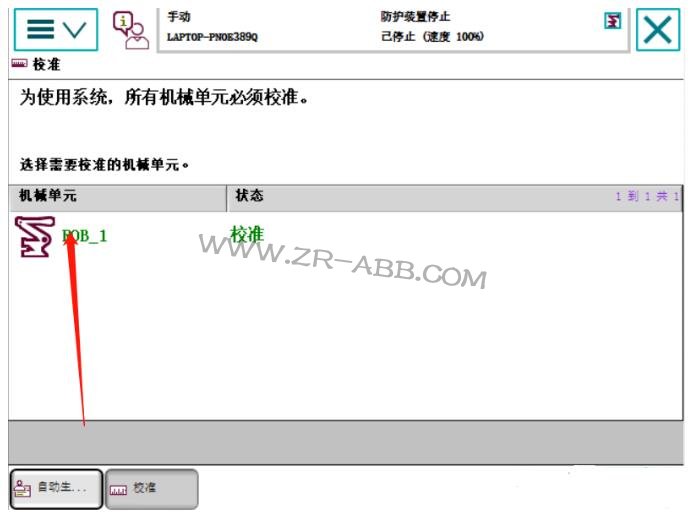
2.点击ROB_1进入,选择手动方法(高级)
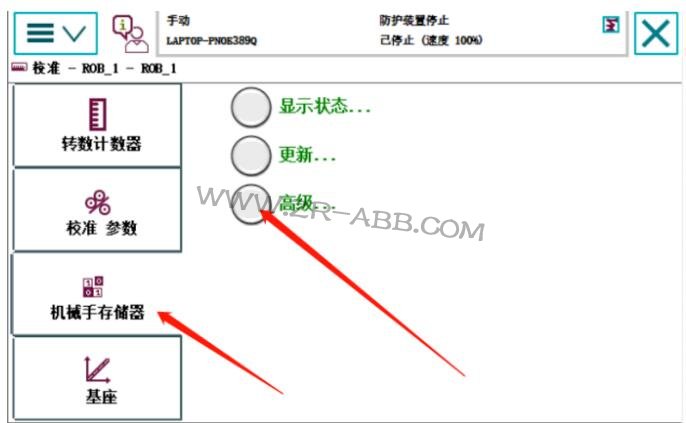
3.点击进入机械手存储器,选择高级
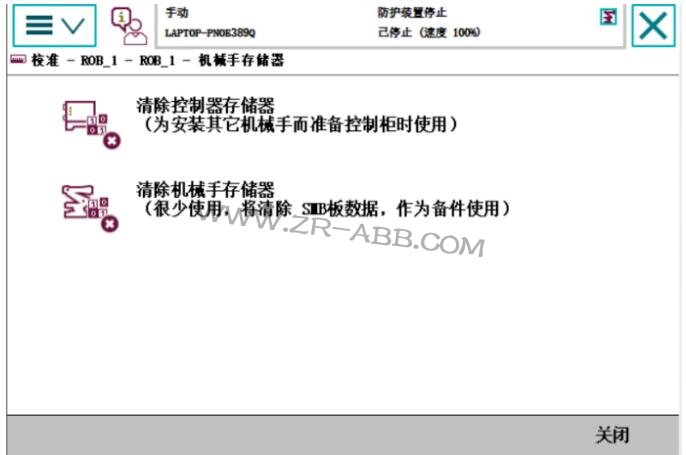
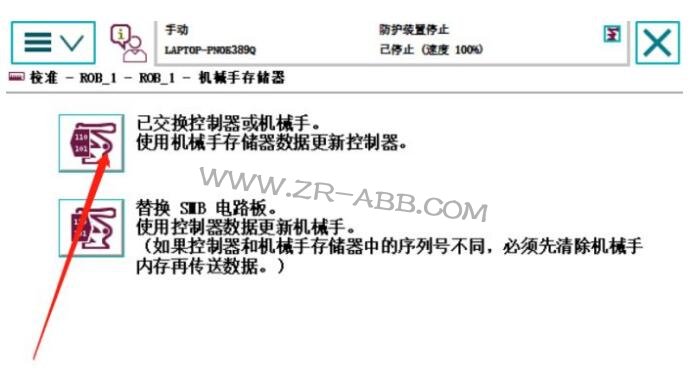
4.进入如下画面,要注意是控制柜故障要更换控制柜,保留机械手数据时此步应选……
一、机器人**次上电开机报警“50296,SMB内存数据差异.
机器人维修处理方法:
1.ABB主菜单中选择“校准”。

2.点击“ROB_1”进入,选择“手动方法(高级)”
4.进入如下画面,要注意是控制柜故障要更换控制柜,保留机械手数据时此步应选择——“清除控制器存储器”;是机械手本体故障要更换或更换SMB数据板,需要保留控制柜数据,后续导入机械手本体的数据板时,此步应选择“清除机械手存储器”。此处以“清除控制器存储器”为例。
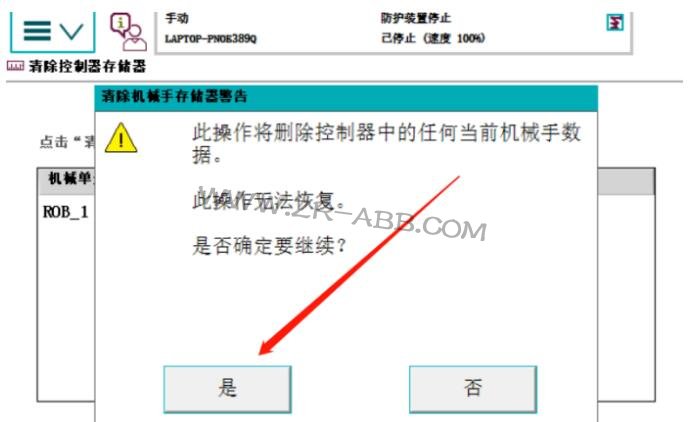
5.点击进入“清除控制柜存储器”后,选择“ROB_1”,点击“清除”

6.弹出以下对话框,选择“是”。
7.清除后关闭页面,回到“机械手存储器”页面,选择“更新”。

8.此处根据第4步的选择决定,上述步骤我们选择了“清除控制柜存储器”,所以此处应选择“已交换控制器或机械手”将机械手数据导入控制柜中。
二、开机出现系统故障。
此处首先介绍一下机器人的几种重启方式:
1.重启一次。
2.若重启没有解决,查看故障信息,排除故障。
3.若还未解决,执行B启动,恢复至*近一次无错误状态。
4.B启动无效,请尝试P启动。
5.若还未解决请尝试I启动(慎用,机器人将恢复出厂设置)。
三、机器人出现10106维护时间提醒
机器人周期维护提醒,不会影响正常运转,但由于这一点,使用者常常忽视,仅仅将维护工作做在表面,甚至根本不做,等到真正出现故障停机停产时,难免手忙脚乱。
此报警是根据系统时间与ABB厂家的标准周期发生的,机器人应用环境不同,维护周期
也不同,详细可留言“机器人维护保养”获取维护指导。
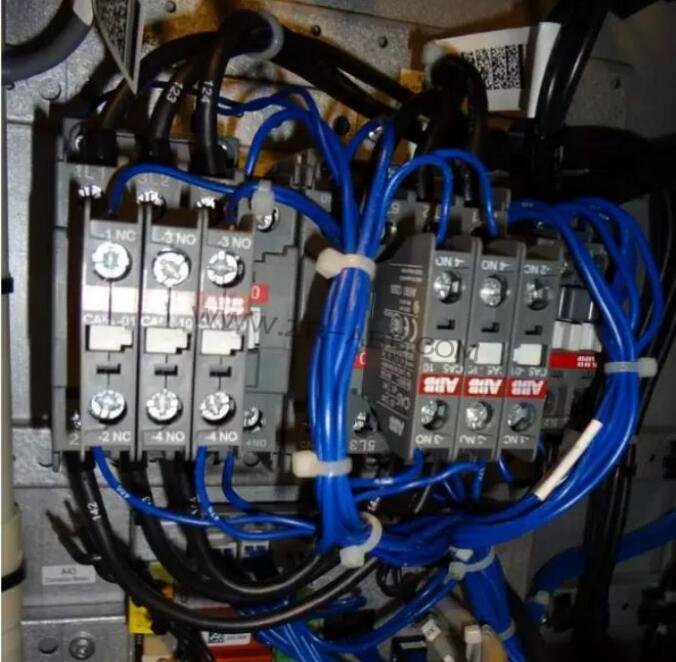
四、报警37001 电机开启接触器错误
处理方法:
1.表示接触器动作故障。
2. 接触器位于柜内左下角,如下图:
五、报警50204动作监控
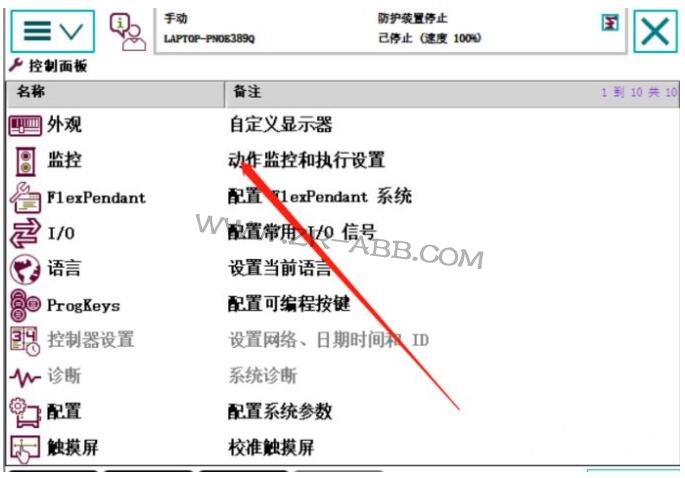
1.修改机器人动作监控参数(控制面板—动作监控菜单中)以匹配实际的情况。
2.用AccSet指令降低机器人加速度。
程序编辑时“添加指令”中找到“setting”项,插入“AccSet”指令

3.减小速度数据中的v_rot选项。
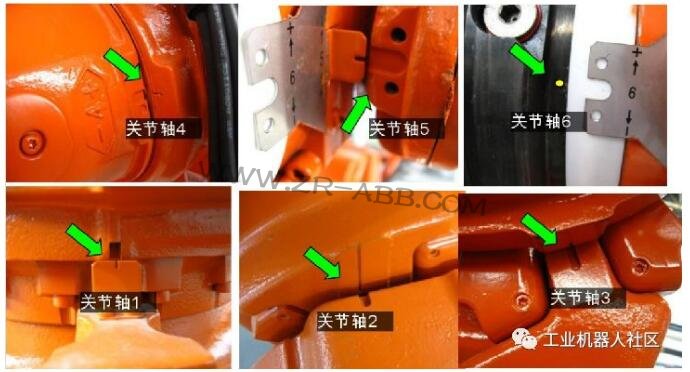
六、转数计数器未更新
1.先将机器人每个关节移动至机械零点。
2.主菜单中选择“校准”。
3.选择“ROB_1”
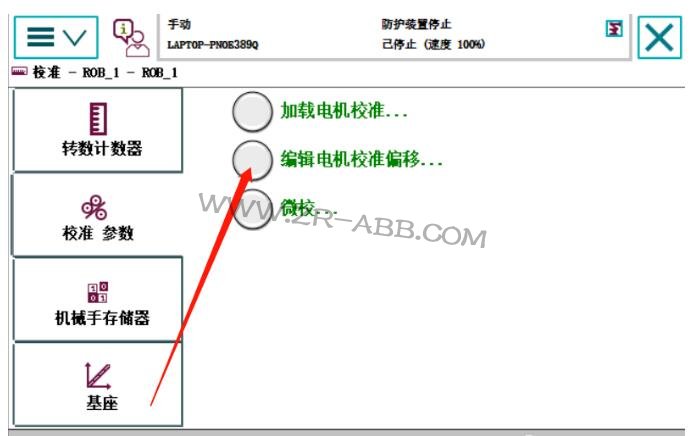
4.点击进入“手动方法(高级)”后,以下选择“校准 参数”——“编辑电机校准偏移”。
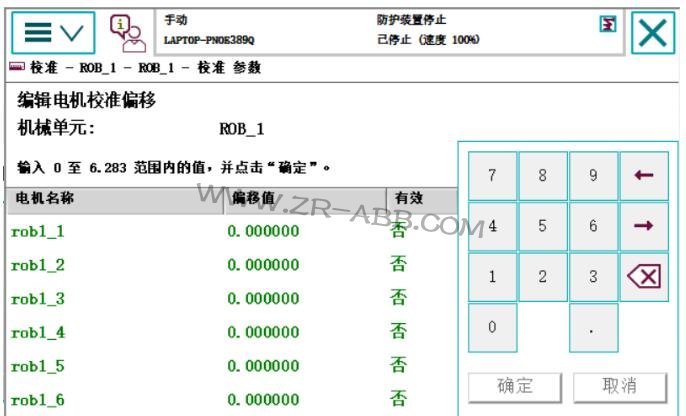
4.在以下画面确认电机校准偏移数据是否与 一致,电机校准偏移数据一般在机器人2轴上,若不一致,以出厂值为准,输入。
5.确定后返回校准界面,点击“更新转数计数器”
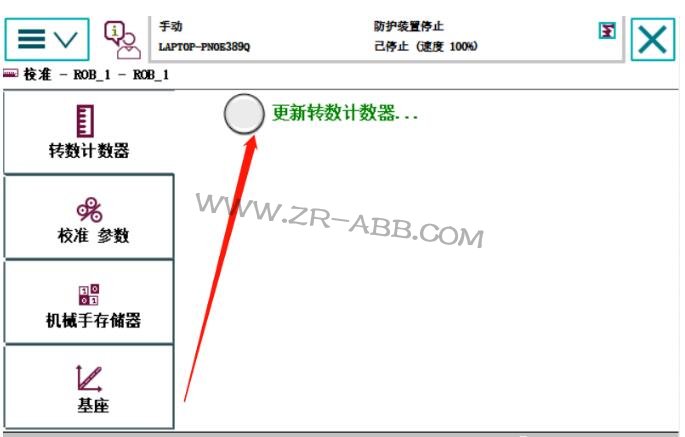
6.弹出对话框选择“是”,选择当前机械单元后,点击“确定”。

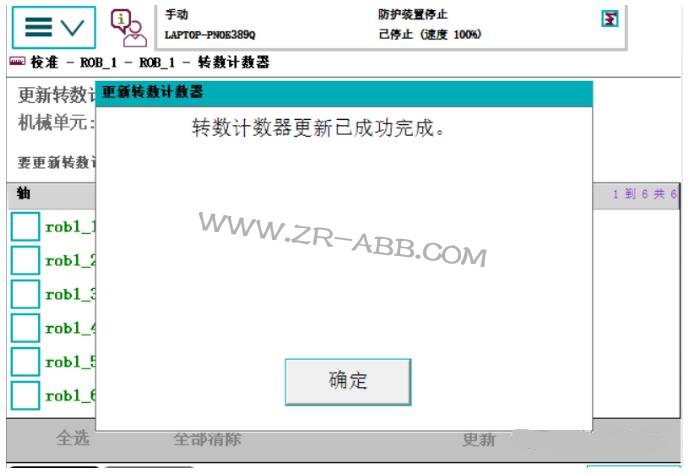
7.根据目前能转至零刻度点的轴选择更新轴(有些情况下无法6轴同时回到零刻度点,可以分多次更新),点击“更新”。

8.弹出对话框,选择“更新”,出现以下界面。
来源:网络
来源:网络
更多资讯:ABB机器人