
 产品:80
产品:80
 联系我们
联系我们

目的
MultiMove的用途在于让一个控制器操作数个机械臂,这不仅能节约硬件成本,还能
对不同机械臂和其他机械单元之间进行前进协调。
此处是一些应用示例:
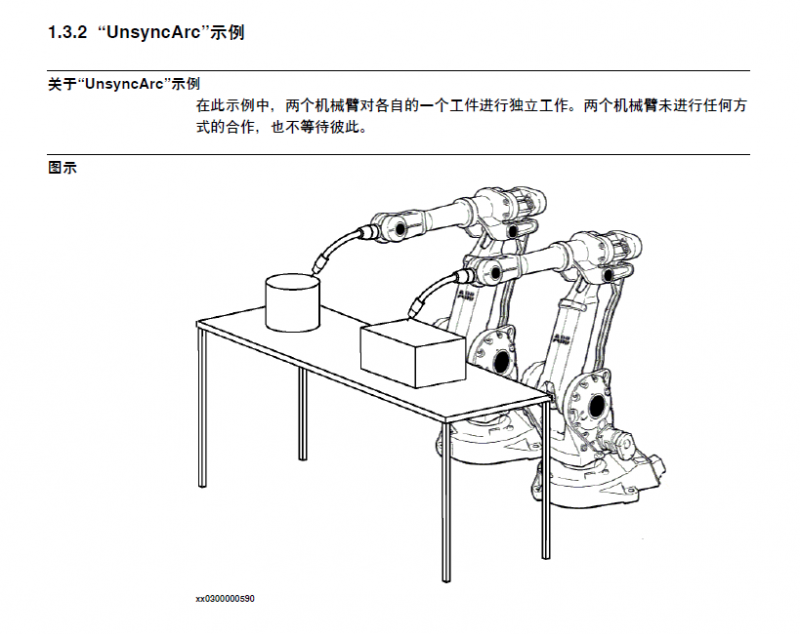
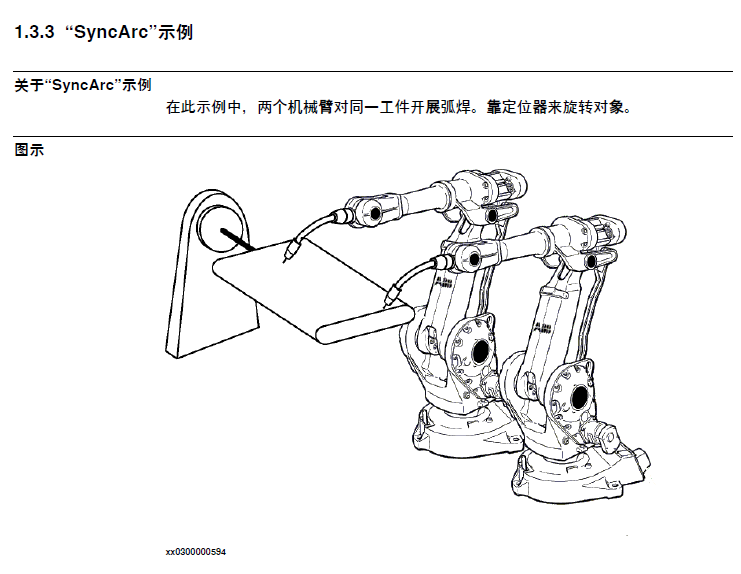
• 数个机械臂可以对同一移动对象开展工作。
• 一个机械臂可以移动一个对象,而另一机械臂可以对该对象进行工作。
• 数个机械臂可以进行合作来举升重物。
所含功能
MultiMove*多能让6项任务作为运动任务(具备移动指令的任务)。由于可采用的驱
动模块不超出4个,因此,一个控制器*多可以操作4个机械臂。然而,单独任务(总
数*多为6项运动任务)可以操作附加轴。
两种MultiMove附加功能都能供您实施:
• 独立移动(参见第57页的独立移动)
• 半联动移动(参见第60页的半联动移动)
除了上述外,MultiMove Coordinated附加功能还能供您实施:
• 联动同步移动(参见第68页的联动同步移动)
所含附加功能
如果您具备MultiMove,那么您能自动访问使用MultiMove时所需用到的一些选项。
MultiMove通常包含下列选项:
• Multitasking
除了上述外,MultiMove Coordinated还包含下列选项:
• Multiple Axis Positioner
基本方法
这是设置MultiMove系统的常用方法。
1 安装硬件和软件(参见第19页的安装)。
2 配置系统参数(参见第29页的配置)。
3 校准坐标系(参见第39页的校准)。
4 为各任务编写RAPID程序(参见第53页的编程)。
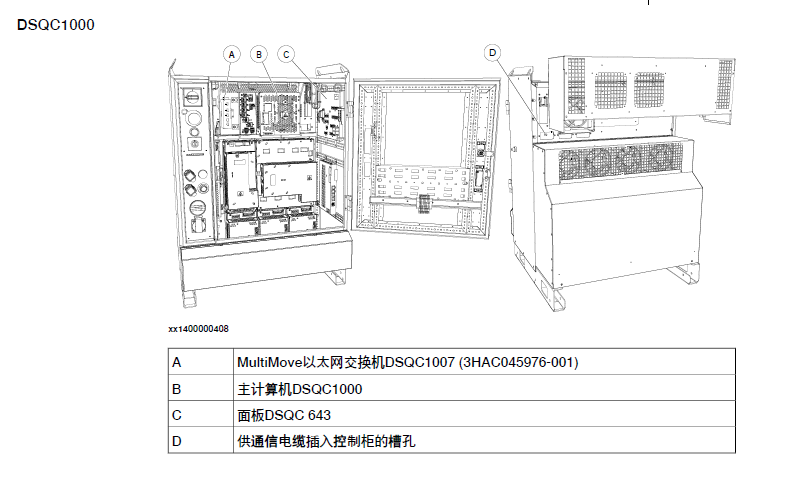
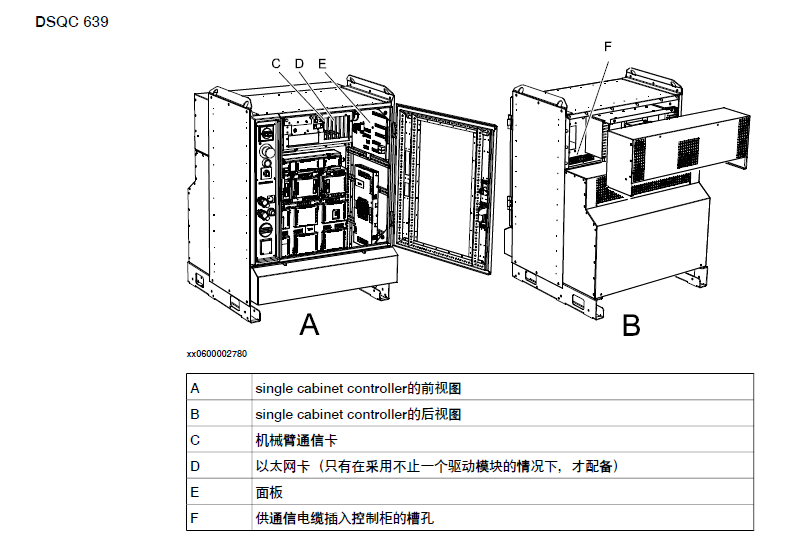
2.1.2 控制模块的连接
将驱动模块连至控制模块
在交货时,以太网网线和安全信号电缆均连至驱动模块。太网网线和安全信号电缆也
连至控制模块槽孔中配的屏蔽板处。
取下空槽孔的罩子,将通信电缆的屏蔽板安装就位。按第21页的以太网连接的要求连
接以太网网线,按第23页的安全信号连接件的要求安装安全信号电缆。
来源:网络
更多资讯:ABB机器人