
 产品:80
产品:80
 联系我们
联系我们

安全区域:监控机器工具/上臂是否在特定区域。如果违反,设置机器人停止或输出相应的信号。优化工作区域/围栏大小,简化安装安全保护。它保护操作者、机器和设备。
安全轴范围:监控机器人各轴的工作位置是否在特定区域。当违反时,可以设置机器人停止或输出相应的信号。取代电子限制开关,增加控制和灵活性,并减少维护要求。
安全机器人速度:监控机器人的速度,使操作员可以在机器人附近工作。
机器人静态监控:当机器人静止时,不需要将机器人切换到电机进行关机。它使操作员能够在机器人附近执行任务。
循环制动检查:定期检查制动器,确保制动器运行良好。
SafeMove2可以通过RobotStudio完成图形化的配置,如图1。

图1 Safemove2 图形化配置环境
SafeMove2也可通过RobotStudio在线显示当前机器人违规情况,如图2。

图2 RobotStudio在线显示SafeMove2违规情况
与SafeMove1代(图 3)不同,SafeMove2(图4和图5)区域功能的激活信号、机器人违规状态的输出信号不再使用硬接线,而全部采用安全总线。此处举例使用ProfiSafe总线。故使用SaveMove2的机器人至少有888-2 PROFINETController /Device或888-3 PROFINET Device选项,使得机器人能够与外界通过PROFINET通讯。

图3 SafeMove1硬件

图 4 SafeMove2 硬件 DSQC1015
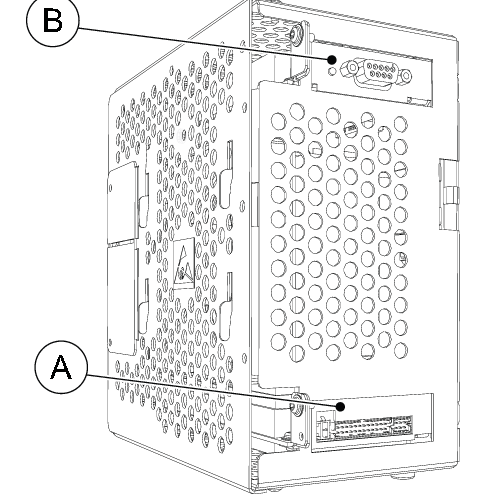
图5 SafeMove2 硬件位于控制器A处
使用SafeMove2的机器人,使用PROFISAFE总线,必须至少还具备图6中的3个机器人系统选项:

图6 SafeMove2机器人需要的选项
若添加735-7Keyless Mode Switch,3modes选项,则原有控制柜上的钥匙开关可以移除,相关功能被集成到示教器端(图7)。

图 7 使用Keyless功能,钥匙开关等功能集成到示教器端
手动操纵ABB机器人三步走
第1步
选择合适的动作模式
一般来说,直线运动是一种比较方便的运动方式。机器人会根据直线行走的需要自动调整各轴,从而达到直线行驶的目的。运动时的姿态和轨迹比较直观。

第二步
选择合适的坐标系
为了对直线运动进行坐标化,必须选择合适的坐标系。坐标系指定了直线运动的参考方向,称为X、Y和Z方向。基准标记是机器人自带的坐标系。它的方向在机器人安装过程中已经确定,不能修改。因此,在一般的手动控制中,机器人直线运动的***是基点。

第三步
操作示教器
左手按住示教器使能器,右手轻轻捏住摇杆,推动摇杆,机器人开始运动。摇杆被推动的幅度决定了机器人运行的速度。线性运动时***基座标。

来源:网络
更多资讯:ABB机器人