
 产品:80
产品:80
 联系我们
联系我们

软限位可以说是在我们安装调试中会经常使用到的,比如在某个轴的运动范围内存在其它设备会与机器人发生干涉,或者非标的机器人夹具与管线包可能限制了机器人5轴与6轴的运动范围等,在这些已知的必定会发生干涉的地方我们***好事先就把软限位设定好,毕竟不需要添加任何成本,而且还可以避免以后误操作造成财产损失。

控制面板的配置菜单中选择motion主题的arm选项。
以一轴为例,可以看到菜单中有Upper Joint Bound与Lower Joint Bound菜单选项,它们就是对应着1轴的上软限位与下软限位的设置。注意,此处的设置值的单位是弧度。

对于数学不是特别棒的小伙伴我们来复习一下角度与弧度的转换公式:
1弧度=180/π 度
1度=π/180 弧度
1弧度等于57.3度,1弧度等于60弧分,1弧分等于60弧秒,所以1弧秒就是3600分之一弧度,就是0.01592度。
因为:角度180°=π弧度
所以:
1弧度=(180/π)°角度
1角度=π/180弧度
硬限位设置
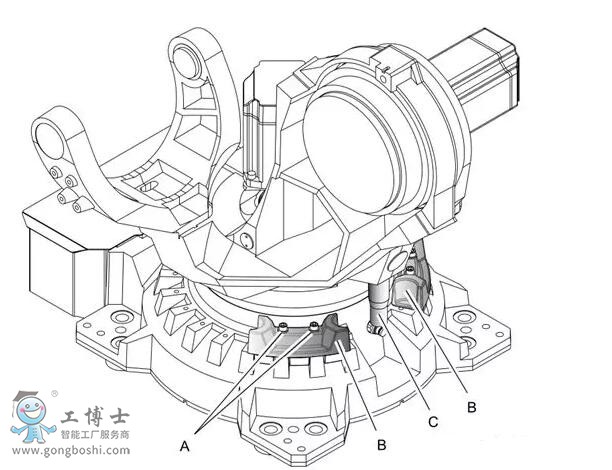
硬限位我们都知道它是通过货真价实的机械结构来实现限位功能的,ABB机器人对于部分型号的机器人的部分关节轴是有轴硬限位的解决方案的。下面以6700机器人为例机器人的硬限位是如何设置的。
来源:网络
更多资讯:ABB机器人